Josiann’s parallel mode
In this tutorial, we will explain how to use Josiann’s parallel mode for solving similar problems in parallel. For clarity, we will showcase it on 3 deterministic functions since Josiann can also work on non-noisy cost functions.
[1]:
import plotly.io as pio
pio.renderers.default = "png"
[2]:
import numpy as np
import plotly.graph_objects as go
import numpy.typing as npt
import josiann as jo
/home/mbouvier/git/josiann/josiann/algorithms/sequential/base/sa.py:9: TqdmExperimentalWarning:
Using `tqdm.autonotebook.tqdm` in notebook mode. Use `tqdm.tqdm` instead to force console mode (e.g. in jupyter console)
Defining the problems
We will attempt to find the global minima of 3 functions in parallel. Each have a different minimum location but can be computed from the same cost function.
Indeed, the parallel mode still only accepts a single cost function, which can be parametrized to define multiple problems. Let’s look at this function:
[3]:
def cost(x: npt.NDArray[np.float64], d: npt.NDArray[np.float64]) -> npt.NDArray[np.float64]:
return 0.6 + np.sum(
np.sin(1 - 16 / 15 * x) ** (d + 1)
- 1 / 50 * np.sin(4 - 64 / 15 * x) ** d
- np.sin(1 - 16 / 15 * x) ** d
)
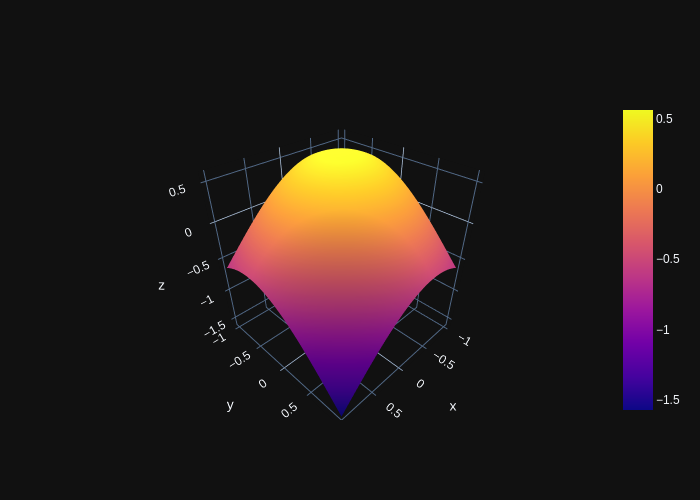
With 3 different values of d (0, 1, 2), we obtain different cost functions (in 2D space) with global minima at positions (1, 1) (0.47, 0.47) and (0.31, 0.31) respectively.
[4]:
d_1, d_2, d_3 = 0, 1, 2
X = np.linspace(-1, 1, 100)
Y = np.linspace(-1, 1, 100)
xv, yv = np.meshgrid(X, Y)
coords = np.concatenate((xv.flatten()[:, None], yv.flatten()[:, None]), axis=1)
[5]:
fig = go.Figure(data=[go.Surface(x=X, y=Y, z=np.array([cost(c, d_1) for c in coords]).reshape(100, 100))])
fig.show()
[6]:
fig = go.Figure(data=[go.Surface(x=X, y=Y, z=np.array([cost(c, d_2) for c in coords]).reshape(100, 100))])
fig.show()

[7]:
fig = go.Figure(data=[go.Surface(x=X, y=Y, z=np.array([cost(c, d_3) for c in coords]).reshape(100, 100))])
fig.show()

Defining a cost function
In parallel mode, the cost function is not defined as in the sequential modes:
its first argument should be a
josiann.parallel.ParallelArgumentobjectit can have optional positional arguments to receive constant parameters
it should not return anything.
The josiann.parallel.ParallelArgument object tells the function what needs to be computed at a given iteration of the SA algorithm. Because position vectors evolve independently, the number of requested function evaluations can be different for each parallel problem. Position vectors and the number of function evaluations can be obtained using the ParallelArgument.positions and ParallelArgument.nb_evaluations attributes. Additional parallel arguments are given by the
ParallelArgument.args attribute.
A formatted list of position vectors and associated parallel arguments can be obtained with the convenience attribute ParallelArgument.where_evaluations.
[8]:
def _cost(x: npt.NDArray[np.float64], d: npt.NDArray[np.float64]) -> npt.NDArray[np.float64]:
return 0.6 + np.sum(
np.sin(1 - 16 / 15 * x) ** (d + 1)
- 1 / 50 * np.sin(4 - 64 / 15 * x) ** d
- np.sin(1 - 16 / 15 * x) ** d,
axis=1
)
def paralell_cost_function(args: jo.parallel.ParallelArgument) -> None:
x, d = args.where_evaluations
args.result = _cost(x, d)
In this example, we will have 3 parallel problems in parallel, each obtained with different values of d (0, 1, 2). At some given iteration of the SA algorithm, we will thus have 3 different position vectors (x_1, x_2 and x_3) each requiring different numbers of function evaluations (n_1, n_2, n_3).
The josiann.parallel.ParallelArgument will thus contain:
positions: a matrix (x_1, x_2, x_3)
nb_evaluations: a list (n_1, n_2, n_3)
args: a list (0, 1, 2)
The attribute where_evaluations will give:
[
(x_1, 0),
..., # repeated n_1 times
(x_1, 0),
(x_2, 1),
..., # repeated n_2 times
(x_2, 1),
(x_3, 2),
..., # repeated n_3 times
(x_3, 2)
]
Finally, the result of the function evaluations must not be returned but rather stored in the ParallelArgument object by assigning it to the ParallelArgument.result attribute. Verification code will be triggered to make sure the correct number of costs were computed.
Putting it all together
We are now ready to run Josiann in parallel mode. For that, we’ll need a move function able to generated multiple position vectors, such as josiann.parallel.ParallelSetStep.
We will call the josiann.parallel.psa() algorithm, which expects for n parallel problems:
a parallel cost function
n initial position vectors
an optional list of parallel arguments (arrays of length n)
optional constant arguments, with the same value for each parallel function
[9]:
res = jo.parallel.psa(paralell_cost_function,
x0=np.array([[0, 0], [0, 0], [0, 0]]),
parallel_args=[np.array([0, 1, 2])],
bounds=[(-1, 1), (-1, 1)],
moves=jo.parallel.ParallelSetStep(position_set=[np.linspace(-1, 1, 21),
np.linspace(-1, 1, 21)]),
max_measures=1,
max_iter=2000,
backup=True,
seed=42)
The parallel SA algorithm converged on one position vector per problem, which can be obtained with
[10]:
res.trace.positions.get_best().x
[10]:
array([[1. , 1. ],
[0.5, 0.5],
[0.3, 0.3]])
From the search space given to the move function, those are the closest values to the true solutions ([1, 1], [0.47, 0.47] and [0.31, 0.31]).
[11]:
res.trace.plot_positions()

The plot of positions now has 3 columns, one for each parallel problem. Red vertical lines shows the iteration at which a particular problem has converged: problem #1 converged first (iteration 1474), then problem #2 (iteration 1974) and problem #3 ran until the end.
As before, the trace of accepted positions is shown in grey. Blue squares show attempted moves (both accepted and refused) and yellow dots show the best found positions as iterations progress.